1条回答
-
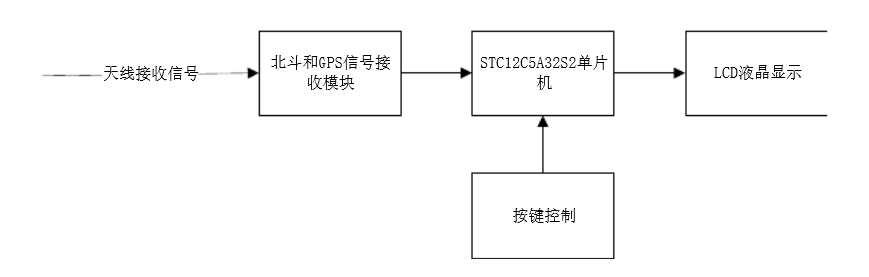
导航是继移动通信之后发展最快的信息产业之一,只要是设计到位置、速度、时间信息的领域斗鱼卫星导航技术相关。中国北斗卫星导航系统是我国自主研制的全球导航系统,是继美国定位系统(GPS)、俄罗斯格洛纳斯卫星导航系统之后的第三个成熟的卫星导航系统。随着北斗导航系统的不断完善,基于北斗导航系统的定位也应用的越来越广泛。小编采用的STC12C5A32S2单片机结合卫星接收模块UM220-III设计的北斗导航系统接收机,UM220-III是双模接收模块,能够同时接受GPS、北斗的信号。这次设计主要完成了导航信息接收机的基本设计,实现了获取实时的位置经纬度、标准时间等相关信息的显示功能。1 原理介绍采用以单片机为核心,读取北斗导航系统模块的标准数据,并在 LCD 屏幕上显示当前的经纬度信息。具体的系统方案图如下:
 1.1北斗 UM220-III 模块简介(1)接口电路北斗模块芯片电路由北斗模块UM220-III N 和其附加电子器件组成。其中北斗模块外接4组排针,在芯片与电源之间串联电感的作用是起差模滤波作用,防止电流突变对芯片产生损坏,并联电感的作用是提高芯片运行的稳定性,防止产生噪声。模块输入端口(UM220-III N 包括:RXD、GPIO、SDA ,SCL 等 如下图)为防止输入端不定态对模块造成影响,模块内置上拉电阻至VCC,因此在模块未加电时,如果上述端口有数据输入,会在模块VCC上形成串电,又可能造成模块上电失败。
1.1北斗 UM220-III 模块简介(1)接口电路北斗模块芯片电路由北斗模块UM220-III N 和其附加电子器件组成。其中北斗模块外接4组排针,在芯片与电源之间串联电感的作用是起差模滤波作用,防止电流突变对芯片产生损坏,并联电感的作用是提高芯片运行的稳定性,防止产生噪声。模块输入端口(UM220-III N 包括:RXD、GPIO、SDA ,SCL 等 如下图)为防止输入端不定态对模块造成影响,模块内置上拉电阻至VCC,因此在模块未加电时,如果上述端口有数据输入,会在模块VCC上形成串电,又可能造成模块上电失败。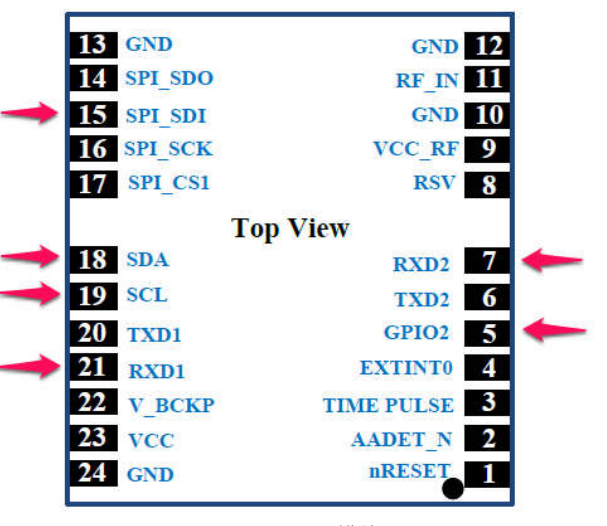 case1:设计中使用 nRESET功能在模块上电后,将nRESET拉低5 ms以上,即可确保模块正常启动。case2:设计中未使用nRESET在模块上电之前,保证模块已连接输入端口为高阻态或低电平,以避免串电。使用串口1的典型用户,需要吧RXD1设置为高阻态或低电平,未使用的其他PIN悬空。程序流程图如下:
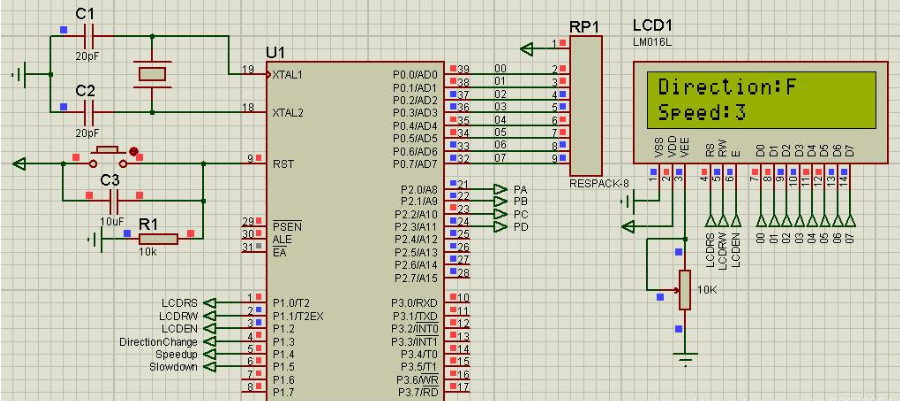
case1:设计中使用 nRESET功能在模块上电后,将nRESET拉低5 ms以上,即可确保模块正常启动。case2:设计中未使用nRESET在模块上电之前,保证模块已连接输入端口为高阻态或低电平,以避免串电。使用串口1的典型用户,需要吧RXD1设置为高阻态或低电平,未使用的其他PIN悬空。程序流程图如下: (2)LCD 液晶显示器LCD液晶显示器数据由单片机p0口进行控制,p2口进行指令控制操作。LCD1602是一种专门用来显示字母,数字,符号等的点阵型液晶模块。1602:显示的内容主要是16*2,即可以显示两行,每行16个字符液晶显示模块。相应的管教功能,百度上都是可以查阅的,所以小编这里就不赘述了。(3)UM220-III 通信协议简介在Unicore 协议中,输入和输出的语句被称为消息。每条消息均为ASCII 字符组成的字符串。消息的基本格式为:KaTeX parse error: Can't use function '\r' in math mode at position 32: …2,data3,……[*cc]\̲r̲\n 所有的消息都以 '’(0x24)开始,后面紧跟着的就是消息名。之后的跟的就是不定数目的参数和数据。消息名与数据之间均以逗号隔开(0x2c)进行分割。最后一个参数是可选的校验和,以 ‘*’(0x2A)与前面的数据分割最后,输入的消息以 ’ \r\n’ 结束。每条消息的总长度不超过256个字节,消息名和参数,校验和中的字母不区分大小写。某些输入命令的某些参数可以省略(在命令描述中被标记为可选)。这些参数可以为空,即在两个逗号之间没有任何字符。
(2)LCD 液晶显示器LCD液晶显示器数据由单片机p0口进行控制,p2口进行指令控制操作。LCD1602是一种专门用来显示字母,数字,符号等的点阵型液晶模块。1602:显示的内容主要是16*2,即可以显示两行,每行16个字符液晶显示模块。相应的管教功能,百度上都是可以查阅的,所以小编这里就不赘述了。(3)UM220-III 通信协议简介在Unicore 协议中,输入和输出的语句被称为消息。每条消息均为ASCII 字符组成的字符串。消息的基本格式为:KaTeX parse error: Can't use function '\r' in math mode at position 32: …2,data3,……[*cc]\̲r̲\n 所有的消息都以 '’(0x24)开始,后面紧跟着的就是消息名。之后的跟的就是不定数目的参数和数据。消息名与数据之间均以逗号隔开(0x2c)进行分割。最后一个参数是可选的校验和,以 ‘*’(0x2A)与前面的数据分割最后,输入的消息以 ’ \r\n’ 结束。每条消息的总长度不超过256个字节,消息名和参数,校验和中的字母不区分大小写。某些输入命令的某些参数可以省略(在命令描述中被标记为可选)。这些参数可以为空,即在两个逗号之间没有任何字符。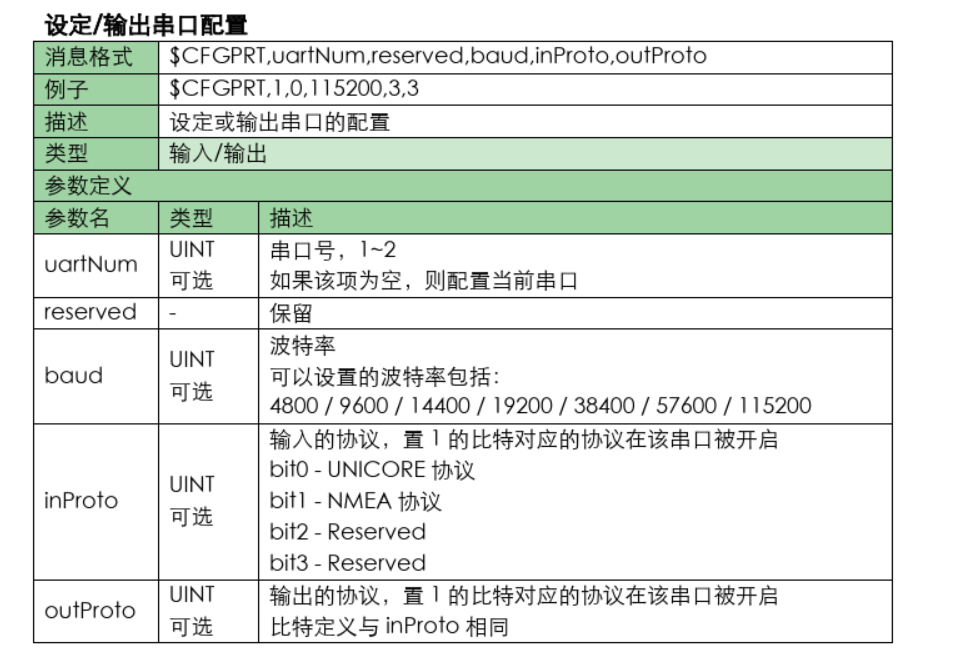 2 调试方法由1.1的原理简介可知,此次课题实现主要由 5 部分组成:系统初始化、设定显示模式、读取预显示内容、送扫描脉冲、送显示数据。这里对单片机与模块的连接做简要说明。UM220/um220-3-n 上带有两组 TTL 电平(2.85V),一组标准电平 RS232电平。当单片机的RS232电平接口接到UM220模块上的RS232上,正常通信。UM220模块上的RS232接口是DB9 母头,可以使用公头的连接线与RS230的接口相连,注意的是通信线需要交叉连接,就像TTL电平中的TXD - - RXD,RXD–TXD 一样,RS232电平通信中也是有2根通信电缆,一个是发送端(PCXD),一个是接收端(PCRXD)。若板子上的RS232 的接口是DB9 母头,那么 2 3针就是 PCRXD 和 PCTXD .第五针就是GND,若没有串口线来连接UM220模块的话,可以考虑在DB9下面的2 3 5 针 焊接出3跟线跟单片机的RS232连接。若单片机是3.3V时,可以将单片机的TTL 接口连接到模块上的TTL接口。连接好后就可以编写程序了。注意,我们使用的 52 单片机的驱动程序,使用的是11.05926 的晶振,波特率为9600.#3 程序编写程序主要是由5部分组成:系统初始化,设定显示模式。读取预显示内容,送扫描脉冲,送显示数据。小编只放主程序部分好了:定义端口及变量
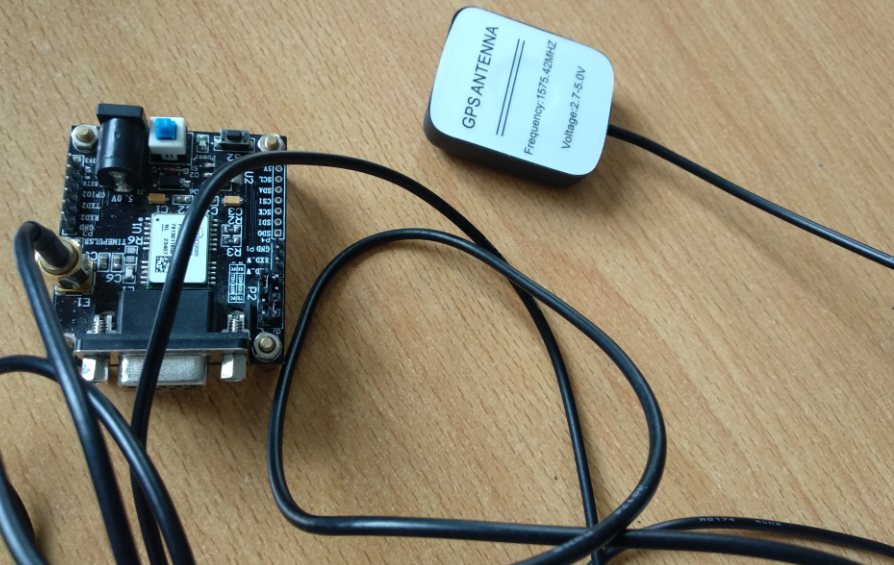
2 调试方法由1.1的原理简介可知,此次课题实现主要由 5 部分组成:系统初始化、设定显示模式、读取预显示内容、送扫描脉冲、送显示数据。这里对单片机与模块的连接做简要说明。UM220/um220-3-n 上带有两组 TTL 电平(2.85V),一组标准电平 RS232电平。当单片机的RS232电平接口接到UM220模块上的RS232上,正常通信。UM220模块上的RS232接口是DB9 母头,可以使用公头的连接线与RS230的接口相连,注意的是通信线需要交叉连接,就像TTL电平中的TXD - - RXD,RXD–TXD 一样,RS232电平通信中也是有2根通信电缆,一个是发送端(PCXD),一个是接收端(PCRXD)。若板子上的RS232 的接口是DB9 母头,那么 2 3针就是 PCRXD 和 PCTXD .第五针就是GND,若没有串口线来连接UM220模块的话,可以考虑在DB9下面的2 3 5 针 焊接出3跟线跟单片机的RS232连接。若单片机是3.3V时,可以将单片机的TTL 接口连接到模块上的TTL接口。连接好后就可以编写程序了。注意,我们使用的 52 单片机的驱动程序,使用的是11.05926 的晶振,波特率为9600.#3 程序编写程序主要是由5部分组成:系统初始化,设定显示模式。读取预显示内容,送扫描脉冲,送显示数据。小编只放主程序部分好了:定义端口及变量#include <REG52.H> #include <stdio.h> #include <intrins.h> #include <lcd1602.h> #include <uart.h> #include <delay.h> #include "string.h" #include <stdlib.h> unsigned char flag_rec=0; //接收数据标志 unsigned char num_rec=0; // 计数标志 //char code TIME_AREA= 8; //时区,我们不需要它 unsigned char flag_data; //date flag //only displaty cmd $GPGGA information unsigned char JD[16]; //longitude unsigned char JD_a; //经度方向 unsigned char WD[15]; //latitude unsigned char WD_a; // 纬度方向 unsigned char date[6]; //date unsigned char time[6]; //date unsigned char time1[6]; //date unsigned char speed[5]={'0','0','0','0','0'}; // 速度 unsigned char high[6]; // 高度 unsigned char angle[5]; //方位角 unsigned char use_sat[2]; // 卫星计数器 unsigned char total_sat[2]; //卫星总数 unsigned char lock; //位置状态 //date handing variable unsigned char seg_count; // 逗号计数器 unsigned char dot_count; //小数点计数器 unsigned char byte_count; // 位计数器 unsigned char cmd_number; // 命令模式 unsigned char mode; // unsigned char buf_full; unsigned char cmd[5]; // 存储命令模式 //serial disconnect timer unsigned long int tt=0;主函数 系统初始化
//main void main () { int jd_second,wd_second; // 中间变量 init_uart(); //初始化序列号 lcd_init() ; // 初始化 lcd1602 delay(200); LCD_Write_String(0,0,"Please Waiting..."); // "Please Waiting" when it is boot up delay(200); delay(200); delay(200); delay(200); delay(200); delay(200); delay(200); delay(200); delay(200); delay(200); // 延迟显示 write_com(0x01); // 清屏设置延时函数,以形成视觉暂留
while(1) { tt++; if(tt>10000) { tt=10000; write_com(0x01); LCD_Write_String(3,0,"No Data!"); LCD_Write_String(3,1,"No Data!"); delay(200); delay(200); delay(200); delay(200); delay(200); }读取预显示内容,设置显示格式,转16进制为10进制**
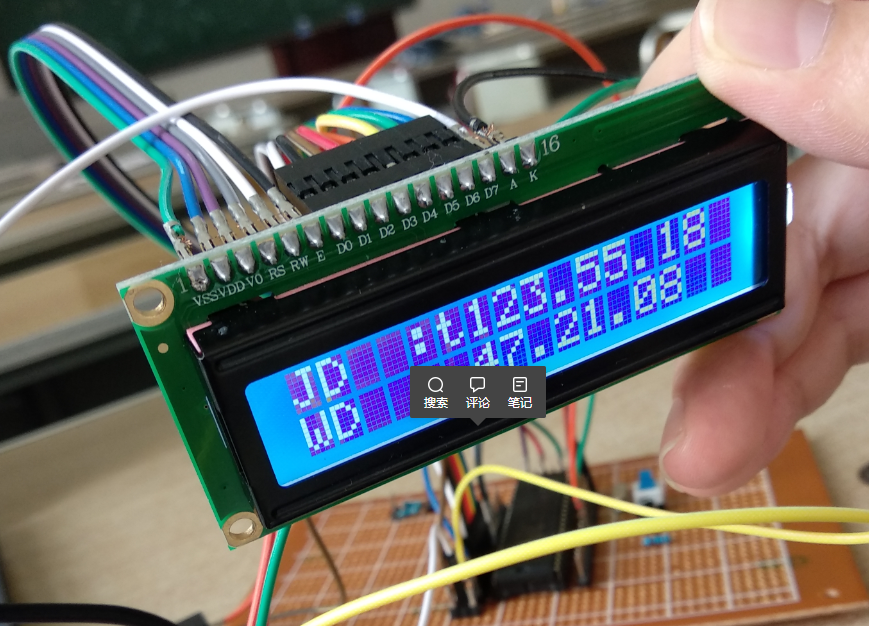
if(flag_rec==1) // 获取gps数据 { flag_rec=0; // 清除标志符 if (lock==1) // 获取位置信息 { // LCD_Write_String(0,0,"JD :"); // 显示经度 LCD_Write_String(6,0,JD); // 显示数据 LCD_Write_String(9,0,"."); // 进制转换 LCD_Write_String(10,0,JD+3); jd_second=60*atof((char *)(JD+5)); LCD_Write_Char(13,0,jd_second/10+'0'); // 将上一步转换得到浮点数据打印在lcd LCD_Write_Char(14,0,jd_second%10+'0'); // 将上面得到的数据分为两部分,分别打印在LCD 上 LCD_Write_Char(15,0,' '); //填充空间 delay(200); // 保护lcd LCD_Write_String(0,1,"WD :"); // 显示下一行 LCD_Write_String(6,1,WD); LCD_Write_String(8,1,"."); LCD_Write_String(9,1,WD+2); // 小数点 wd_second=60*atof((char *)(WD+4)); // 将字符串转换成浮点数 LCD_Write_Char(12,1,wd_second/10+'0'); LCD_Write_Char(13,1,wd_second%10+'0'); LCD_Write_String(14,1," "); delay(200); } } } }串口中断函数及模式判断
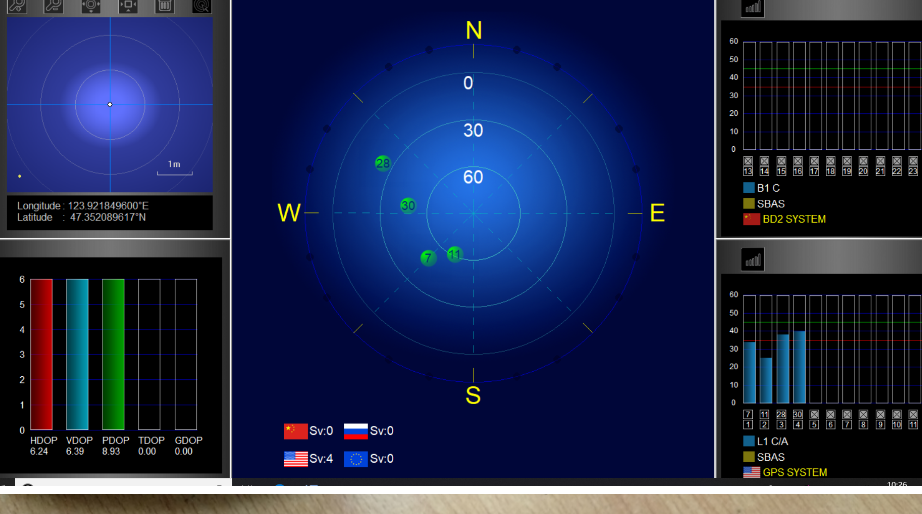
判断的主要依据就是接收端接受消息与预结果匹配,通过设置数组[i,j]和if函数进行判断匹配(发送报文的消息内容见1.3的UM220的通信协议详解)//serial interruupt service function void ser_int (void) interrupt 4 { unsigned char tmp; if(RI) { tt=0; RI=0; tmp=SBUF; // 从缓冲区接收数据 switch(tmp) //if $GPGGA,$GNGSW,$GNRMC,get data then processing it { //date start with $ case '$': cmd_number=0; // 清除命令模式 mode=1; // 选项命令接收模式 byte_count=0; //清除位计数器 flag_data=1; // 设置数据标志 flag_rec=1; // 设置数据接收标志 break; case ',': //Eg:$GNRMC,134645.000,A,2603.964436,N,11912.410232,E,0.000,15.744,030718,,E,A*0B seg_count++; // 计数器增加 byte_count=0; break; case '*': switch(cmd_number) { case 1: buf_full|=0x01; //00000001 break; case 2: buf_full|=0x02; //00000010 break; case 3: buf_full|=0x04; //00000100 break; } mode=0; //clear mode break; default: // receive date cmd if(mode==1) { cmd[byte_count]=tmp; // 获取数据和存储缓冲区 if(byte_count>=4) //overlook cmd which less 4 bit { if(cmd[0]=='G') // 第一个字符 { if(cmd[1]=='N') { if(cmd[2]=='G') { if(cmd[3]=='G') { if(cmd[4]=='A')//判断$GNGGA { cmd_number=1; //数据类型 mode=2; //接收日期 seg_count=0; //comma counter clear byte_count=0; //位计数器清除 } } else if(cmd[3]=='S') //命令模式$GNGSV { if(cmd[4]=='V') { cmd_number=2; mode=2; //获取数据 seg_count=0; byte_count=0; } } } else if(cmd[2]=='R') //命令模式 $GNRMC { if(cmd[3]=='M') { if(cmd[4]=='C') { cmd_number=3; mode=2; //存储数据 seg_count=0; byte_count=0; } } } } } } } //日期处理else if(mode==2) { switch (cmd_number) //if receive data { case 1: //get and store data,$GPGGA,[],[],[],[],[],[],[],[],[]..... switch(seg_count) // comma 计数器 { case 2: // 2rd逗号后的纬度 if(byte_count<9) { WD[byte_count]=tmp; //获取纬度 } break; case 3: //纬度方向 if(byte_count<1) { WD_a=tmp; } break; case 4: //经度 if(byte_count<10) { JD[byte_count]=tmp; //存储 } break; case 5: //经度方向 if(byte_count<1) { JD_a=tmp; } break; case 6: //location if(byte_count<1) { lock=tmp; } break; case 7: if(byte_count<2) { use_sat[byte_count]=tmp; } break; case 9: // 高度 if(byte_count<6) { high[byte_count]=tmp; } break; } break; case 2: //命令模式 $GPGSV switch(seg_count) { case 3: // 卫星总数 if(byte_count<2) { total_sat[byte_count]=tmp; } break; } break;//命令模式3:无SUE case 3: //$GPRMC switch(seg_count) { case 1: //time if(byte_count<6) { time[byte_count]=tmp; } break; case 2: // 位置 if(byte_count<1) { if (tmp=='V') {lock=0;} else { lock=1; } } break; case 3: //lititude // if(byte_count<9) // { // WD[byte_count]=tmp;//我们只需要一次 // } break; case 4: // if(byte_count<1) { WD_a=tmp; } break; case 5: // // if(byte_count<10) // { // JD[byte_count]=tmp; //do not get again // } break; case 6: // 直线方向 if(byte_count<1) { JD_a=tmp; } break; case 7: // 速度处理 if(byte_count<5) { speed[byte_count]=tmp; } break; case 8: // 方向角 if(byte_count<5) { angle[byte_count]=tmp; } break; case 9: //other if(byte_count<6) { date[byte_count]=tmp; } break; } break; } } byte_count++; // 位计数器++ break; } }4 结果显示
 256 举报
256 举报

103电阻是多少
STM32 39027人阅读
Linux内核printfk打印信息怎么打开
Linux驱动 8952人阅读
IAR怎么输出二进制BIN文件?
STM32 8434人阅读
nrf52840串口透传例程数据回显从机发送给主机数据同时也会收到同样的回复消息的问题
RF/无线 7529人阅读
Keil MDK5中…\OBJ\LED.axf: error: L6002U: Could not open file …\obj\main.o: No such file or directory的错误
STM32 7198人阅读
Altium Designe PCB设计规则检查报错Net Antennae: Track怎么解决?
AltiumDesigner 6696人阅读
Error:Flash Download failed -“Cortex-M3”异常的解决方法
工具软件 6058人阅读
T113-S3添加LVGL官方例程example,运行后触摸屏不能用的问题
嵌入式Linux 5972人阅读
请问如何用单片机+北斗模块实现定位功能?
51单片机 5968人阅读
手机蓝牙配对错误 sd_ble_gap_data_length_update() (request) on connection 0x0 returned NRF_ERROR_RESOURCES的问题
RF/无线 5964人阅读
Keil中怎么复制memory窗口中的数据?
工具软件 5879人阅读
Keil MDK5解决error: L6002U: Could not open file …\obj\main.o: No such file or directory的错误
STM32 5812人阅读
请问怎么设置蓝牙芯片NRF52840设置一直广播
RF/无线 5772人阅读
在proteus8.15软件中的Library manger 中没有 Import 按钮 也没有install这个组件
proteus 5766人阅读
ECxx旋转编码器如何消除抖动和杂波
传感器设计与应用 5586人阅读
LoRa同频段不同扩频因子会干扰吗
通信 5531人阅读
T113-S3 SD卡启动时报错VFS: Cannot open root device "mmcblk0p5" or unknown-block(0,0): error -6
嵌入式Linux 4680人阅读
嵌入式开发中的Bit bang是什么意思?
STM32 4182人阅读