用单片机控制步进电机正转 反转 加速 减速;
由LCD1602实时显示步进电机的状态;F-正转 B-反转;数字越大,转速越大;
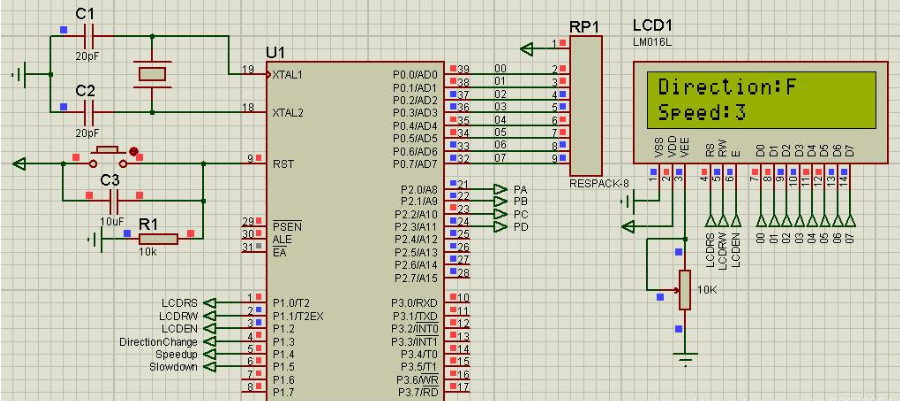
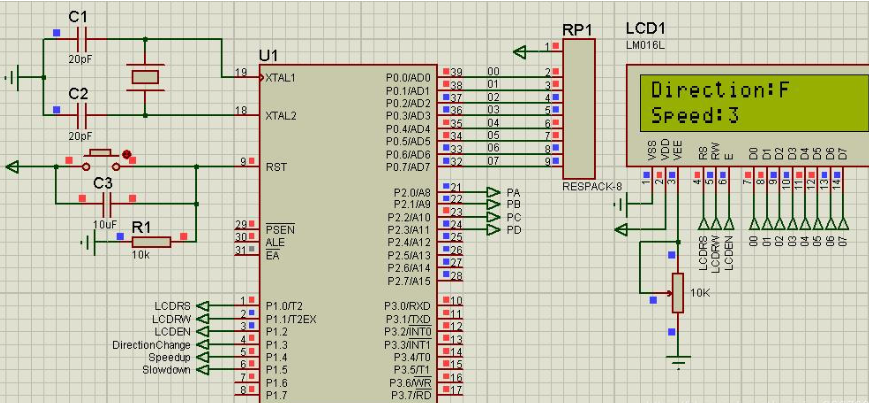
仿真原理图如下:
MCU和LCD1602显示模块:
ULN2803驱动和步进电机模块:
C语言代码如下:
/*----------------------------- FileName: StepperMotor.h Function: 函数头文件 Author: Zhang Kaizhou Date: 2019-6-6 17:59:39 ------------------------------*/ #include <reg52.h> #include <string.h> #define uchar unsigned char #define uint unsigned int #define Factor 5 // 转速控制常数 /*LCD1602端口设置*/ sbit lcdrs = P1^0; sbit lcdrw = P1^1; sbit lcden = P1^2; /*步进电机驱动器端口设置*/ sbit direcChange = P1^3; // 方向翻转 sbit speedUp = P1^4; // 加速 sbit slowDown = P1^5; // 减速 /*主函数声明*/ void keyScan(); void execute(); /*LCD1602显示相关函数声明*/ void LCDInit(); void displayInit(); void display(uchar oper, uchar dat); void writeCommand(uchar command); void writeData(uchar dat); void delay(uchar xms);
/*-------------------------------------------
FileName:main.c
Function: MCU控制步进电机
Description:控制步进电机正转 反转 加速 减速;
由LCD1602实时显示步进电机的状态;
F-正转 B-反转;数字越大,转速越大;
---------------------------------------------
Author: Zhang Kaizhou
Date: 2019-6-6 17:56:41
-------------------------------------------*/
#include "StepperMotor.h"
uchar code pulseTable0[] = {0x08, 0x04, 0x02, 0x01, 0x01, 0x02, 0x04, 0x08}; // 一相励磁(同一时刻只有一个线圈通电,旋转角1.8度)
uchar code pulseTable1[] = {0x0c, 0x06, 0x03, 0x09, 0x09, 0x03, 0x06, 0x0c}; // 二相励磁(同一时刻有两个线圈通电,旋转角1.8度)
uchar code pulseTable2[] = {0x08, 0x0c, 0x04, 0x06, 0x02, 0x03, 0x01, 0x09,
0x09, 0x01, 0x03, 0x02, 0x06, 0x04, 0x0c, 0x08}; // 一-二相励磁场(一二相交替励磁,旋转角0.9度)
uchar speed = 0, startPos = 0; // 默认正转
bit oper = 0/*操作数*/, direcFlag = 0; // 初始状态为正向
void main(){
LCDInit(); // LCD1602显示初始化
displayInit();
while(1){
keyScan(); // 按键扫描
display(0, direcFlag);
display(1, speed);
execute();
}
}
/*按键扫描*/
void keyScan(){
if(!speedUp){ // 加速
delay(5);
if(!speedUp){
if(speed < 4){
while(!speedUp);
speed++;
}else{
while(!speedUp);
speed = 3;
}
}
}
if(!slowDown){ // 减速
delay(5);
if(!slowDown){
if(speed != 0){
speed--;
}else{
while(!slowDown);
speed = 0;
}
}
}
if(!direcChange){ // 方向翻转
delay(5);
if(!direcChange){
while(!direcChange);
direcFlag = ~direcFlag;
}
}
}
/*步进电机控制执行函数*/
void execute(){
uchar i, j;
startPos = (direcFlag == 0) ? 0 : 4; // 方向控制
for(i = startPos; i <= (startPos + 4); i++){
P2 = pulseTable0[i];
for(j = 0; j < (speed + 1) * Factor; j++){ // 用延时来控制脉冲输出的频率,从而控制步进电机转速
delay(10);
}
}
}
/*-----------------------------
FileName:display.c
Function: LCD1602显示函数
Author: Zhang Kaizhou
Date: 2019-6-6 17:58:42
------------------------------*/
#include "StepperMotor.h"
uchar code table0[] = {"Direction:"}; // 每行的字符数据
uchar code table1[] = {"Speed:"};
uchar code table2[] = {"1234"};
uchar code table3[] = {"FB"}; // F-正向 B-反向
/*初始化LCD1602的设置*/
void LCDInit(){
lcden = 0; // 拉低使能端,准备产生使能高脉冲信号
writeCommand(0x38); // 显示模式设置(16x2, 5x7点阵,8位数据接口)
writeCommand(0x0c); // 开显示,不显示光标
writeCommand(0x06); // 写一个字符后地址指针自动加1
writeCommand(0x01); // 显示清零,数据指针清零
}
/*LCD上电界面*/
void displayInit(){
uchar i;
writeCommand(0x80); // 将数据指针定位到第一行首
for(i = 0; i < strlen(table0); i++){
writeData(table0[i]);
delay(5);
}
writeCommand(0x80 + 0x40); // 将数据指针定位到第二行首
for(i = 0; i < strlen(table1); i++){
writeData(table1[i]);
delay(5);
}
}
/*LCD显示函数*/
void display(uchar oper, uchar dat){
if(oper == 0){ // 方向显示
if(dat == 0){ // 正向
writeCommand(0x80 + strlen(table0)); // 数据指针定位到第一行空闲处
writeData(table3[0]);
}else if(dat == 1){ // 反向
writeCommand(0x80 + strlen(table0)); // 数据指针定位到第一行空闲处
writeData(table3[1]);
}
}
if(oper == 1){ // 速度显示
writeCommand(0x80 + 0x40 + strlen(table1)); // 数据指针定位到第二行空闲处
writeData(table2[dat]);
}
}
/*写指令函数*/
void writeCommand(uchar command){
lcdrs = 0; // 命令选择
lcdrw = 0;
P0 = command;
delay(5);
lcden = 1; // 产生一个正脉冲使能信号
delay(5);
lcden = 0;
}
/*写数据函数*/
void writeData(uchar dat){
lcdrs = 1; // 数据选择
lcdrw = 0;
P0 = dat;
delay(5);
lcden = 1;
delay(5);
lcden = 0;
}
/*延时函数*/
void delay(uchar xms){
uint i, j;
for(i = xms; i > 0; i--)
for(j = 110; j > 0; j--);
}